GPSMap
Program GPSMap integruje snad všechny vlastnosti potřebné pro orientaci v terénu, mezi které patří hlavně:
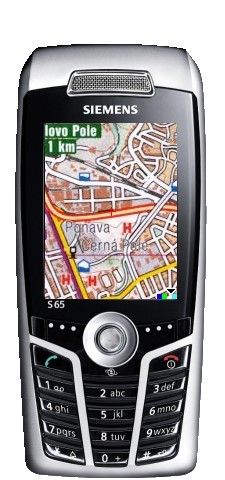
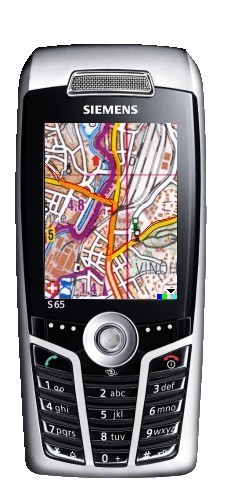
Zobrazování pozice na mapě. Mapy jsou uloženy v paměti telefonu nebo paměťové kartě.
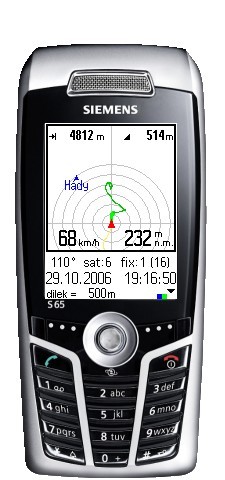
Navigaci po předem připravené trase. Podpora načítání tras ve formátech plt a gpx.
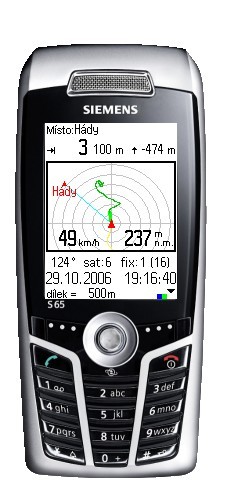
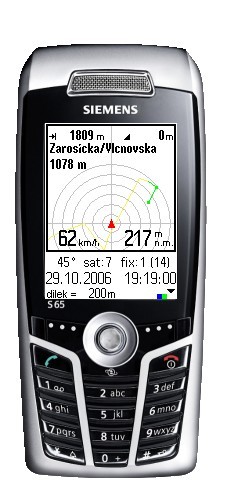
Navigace k určenému bodu se známou pozicí. Podpora načítání míst ve formátech wpt a gpx.
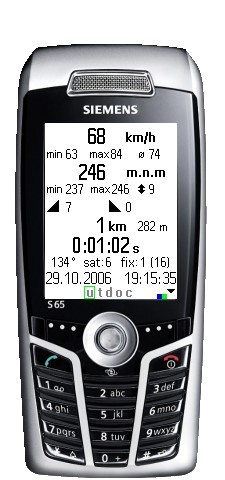
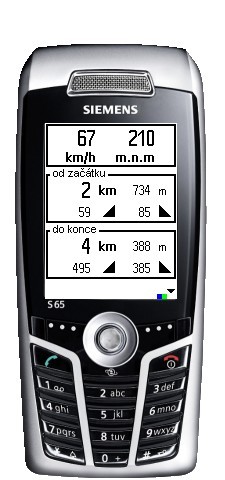
Počítadla tras
Záznam trasy, míst i kompletní komunikace s GPS modulem
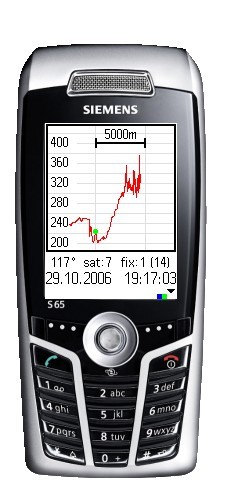
Zobrazení profilů tras
|
|
|
|
|
|
|
|
|
|
Program je ve formě JAVA aplikace určené primárně pro mobilní telefony Siemens S65 s firmware verze 53 v kombinaci s GPS modulem iTec spojeným přes bluetooth. V této kombinaci je testován. Co se týká GPS modulů, je pravděpodobné, že bude pracovat prakticky s libovolným modulem splňujícím protokol NMEA. Moduly s čipem SiRF jsou vítány, protože program je pak schopen přenastavením modulu omezit množství přenášených dat mezi telefonem a modulem a tak snížit spotřebu energie a šetřit výpočetní výkon telefonu pro jiné operace. Co se týká podpory jiných telefonů, snažil jsem se dodržovat standardy, je ale pár míst, kde jsem to úmyslně porušil. Jsou to ta místa, kde telefony S65 nepodporují pro potřebné operace standard. Jsou to například operace se soubory jak v paměti telefonu tak na jeho kartě. Je tedy pravděpodobné, že program bude fungovat na telefonech i na vyšších modelech telefonů Siemens, určitě však nebude fungovat na telefonech jiných značek. Neměl by být větší problém vytvořit klony programu určené i pro jiné telefony. Pokud by měl někdo o takový klon zájem, kontaktujte autora.
Zde si můžete zdarma stáhnout poslední verzi programu. Samozřejmě jak je obvyklé u freeware programů, následky používání programu si nesete sami. Já doufám, že převáží ty pozitivní.
Trasy můžete stahovat z mých stránek o kole, případně se prohrabat mými trasami a záznamy tras z kole, auta i lyží, či snowboardu. Jen pěší tam asi nejsou žádné. Pěšky mě to moc nebaví.
Licenční podmínky mi bohužel nedovolí dát k dispozici i mapy pro tento program, takže tady si můžete stáhnout jen ukázku. Dále si pak vysvětlíme, jak si připravit vlastní mapy:
Dokumentace programu zatím žádná neexistuje, snad nějakou brzo napíšu.
Mapy pro GPSMap jsou založeny na rastrových podkladech map a skládají se z několika souborů uložených v podadresáři adresáře map, z nichž jeden se jmenuje def.gpsmap a další jsou obrázky jednotlivých výřezů mapy. Jméno podadresáře určuje jméno, které uvidíme při výběru mapy v programu. Existuje několik verzí obsahu souboru def.gpsmap a v souvislosti s tím i několik verzí pojmenovávání jednotlivých souborů obsahujících výřezy mapy. Soubor def.gpsmap je obyčejný textový soubor obsahující několik řádků čísel s následujícím významem:
Verze 1
1. řádek - šířka jednoho výřezu mapy v bodech
2. řádek - výška
jednoho výřezu mapy v bodech
3. řádek - počet výřezů mapy na
jednom řádku (ve směru osy x)
4. řádek - x pozice v pixelech mapy
pro otevření mapy
5. řádek - y pozice v pixelech mapy pro otevření
mapy
6. řádek - x souřadnice 1. kalibračního bodu
7. řádek - y
souřadnice 1. kalibračního bodu
8. řádek - lon souřadnice 1.
kalibračního bodu (des. číslo určující počet stupňů)
9. řádek -
lat souřadnice 1. kalibračního bodu (des. číslo určující počet
stupňů)
10. řádek - x souřadnice 2. kalibračního bodu
11. řádek
- y souřadnice 2. kalibračního bodu
12. řádek - lon souřadnice 2.
kalibračního bodu (des. číslo určující počet stupňů)
13. řádek -
lat souřadnice 2. kalibračního bodu (des. číslo určující počet
stupňů)
14. řádek - x souřadnice 3. kalibračního bodu
15. řádek
- y souřadnice 3. kalibračního bodu
16. řádek - lon souřadnice 3.
kalibračního bodu (des. číslo určující počet stupňů)
17. řádek -
lat souřadnice 3. kalibračního bodu (des. číslo určující počet
stupňů)
Jednotlivé výřezy mapy jsou pak pojmenovány map<číslo>.jpg, kde <číslo> odpovídá číslu příslušného výřezu. Jednotlivé, začíná se číslem 1 a číslování je po řádcích. Počet výřezů na jednom řádku udává 3.řádek definičního souboru. Fyzicky nemusí existovat všechny soubory, mapa tedy nemusí být obdelník. Rozdělit mapu na takto pojmenované výřezy lze například programem Map Calibrator. V této verzi dochází k lineární projekci stupňových souřadnic přímo do mapy, což lze použít jen pro mapy malého území, kde je zanedbatelné, že poledníky nejsou přímky, což je použitelné u většiny turistických map.
Verze 2
1. řádek - Version 2
2. řádek -
šířka mapy v bodech
3. řádek - výška mapy v bodech
4. řádek -
šířka jednoho segmentu v bodech
5. řádek - výška jednoho segmentu
v bodech
6. řádek - x pozice v pixelech mapy pro otevření mapy
7.
řádek - y pozice v pixelech mapy pro otevření mapy
8. řádek - x
souřadnice 1. kalibračního bodu
9. řádek - y souřadnice 1.
kalibračního bodu
10. řádek - lon souřadnice 1. kalibračního bodu
(des. číslo určující počet stupňů)
11. řádek - lat souřadnice 1.
kalibračního bodu (des. číslo určující počet stupňů)
12. řádek - x
souřadnice 2. kalibračního bodu
13. řádek - y souřadnice 2.
kalibračního bodu
14. řádek - lon souřadnice 2. kalibračního bodu
(des. číslo určující počet stupňů)
15. řádek - lat souřadnice 2.
kalibračního bodu (des. číslo určující počet stupňů)
16. řádek - x
souřadnice 3. kalibračního bodu
17. řádek - y souřadnice 3.
kalibračního bodu
18. řádek - lon souřadnice 3. kalibračního bodu
(des. číslo určující počet stupňů)
19. řádek - lat souřadnice 3.
kalibračního bodu (des. číslo určující počet stupňů)
Jednotlivé výřezy mapy jsou pak pojmenovány map_<x>_<y>.jpg, kde <x> a <y> odpovídají pozici příslušného výřezu. Pozice levého horního výřezu je x=1 a y=1. Fyzicky nemusí existovat všechny soubory, mapa tedy nemusí být obdelník. Rozdělit mapu na takto pojmenované výřezy lze například programem Splitz. Opět je použita lineární projekce stupňových souřadnic.
Verze 3
Tato verze již používá pro projekci UTM a lze ji použít tedy i pro velké mapy, například autoatlasy. Program tuto verzi umí, jak se to dělá si ale zatím nechám pro sebe.
Verze 4
Vychází z verze 3, navíc však podporuje změnu měřítka (přibližování) mapy na základě mapový podkladů pro jednotlivá měřítka.