HELIiX aneb létající šestiťulník

Co je HELIiX V2
Tohle byl můj se od doby, kdy jsem začal létat s vrtulníky a na EPP Deltě vynesl svůj první fotoaparát. Původní idea, že celý stroj navrhnu včetně elektroniky, vyrobím a naprogramuji vzala kvůli časovým možnostem za své. Dnes se dá podobný stroj snadno koupit. To by ale byla už opravdu žádná modelařina.Výhodou je, že lze za slušný peníz pořídit ESC moduly s opakovací frekvencí 400Hz, které jsou schopny regulovat motory patřičně rychle a přesně. Použitá elektronika DJI NAZA V2 s GPS module umožní elegantní konfiguraci a řízení. Jakmile dodělám základní modul, pustím se do rozšiřování jeho možností.
Základní technické údaje
|
Základní požadavky na vývoj
- automatická stabilizace fotografického/video závěsu (hotovo)
- přenos telemetrie do dotykových displejů firmy 4D Systems (ve vývoji)
- rozlousknutí BT protokolu a vytvoření ovládacího programu pro Android
Uběhl podzim a já téměř většinu volného času strávil dílem návrhem, dílem přípravou podkladů pro CNC a vlastní výrobou. Čas nepočítám, ten raději nechci znát.
Podvozek
Základem podvozku se staly uhlíkové trubičky průměrů 8, 10 a 12mm, duralové soustružené a frézované spojky a několik kulových čepů, používaných pro táhla serv, pro zajištění polohy obou podvozkových nohou. Dvě vodorovně umístěné tyčky nesou celkem 4 kusy duralových rozpěr na které je v zadní části umístěna deska pro baterii, vpředu pak mechanika azimutálního motoru stabilizovaného závěsu. Na konce tyčí přijde umístit informační a komunikační elektronika.
Trup
Trup je tvořen dvojicí sendvičových desek. Tento velice tuhy sendvič vyrábím z letecké 1mm překližky z obou stran zesílené uhlíkovou tkaninou. Hledal jsem způsob, jak udělat povrch rovný a lesklý. Rovný není až takový problém. Stačí k tomu dostatečně silná skleněná deska. Já používám 10mm skleněnou tabuli. Lesklost je už větší oříšek. Jakmile jsem použil jakýkoli separátor, nikdy povrch nebyl dostatečně lesklý a pokud zřejmě byl, tak se přilepil. Řešení kupodivu přinesla naše kuchyně. Silikonový vál. Ten položím na skleněnou desku a na něj přímo laminuji. Poté celý sendvič (sklo, silikon, prosycená tkanina, překližka, sklo) položím na stůl a přelepím pytlíkem na odpadky. Zastrčím hadičku od vývěvy. Atmosférivký tlak pak udělá své.
Obě desky jsou poté sešroubovány pomocí kombinace plastových a kovových distančních sloupků používaných v elektronice. Horní deska nese šestici 30A ESC Opto regulátorů od firmy Foxy. Profrézoval jsem pro ně otvory pro lepší chlazení. Na čtyřech odpružených (silentbloky z CD mechaniky) sloupcích sedí destička s hlavní elektronikou.
Motory
S motory to byl asi největší problém, který jsem měl. Nejprve jsem použil motory AXI 2212/26. Tyto motory ale nejsou plně kompatibilní s originální řídící elektronikou regulátorů DJI. Protože jsem měl právě tyto regulátory, musel jsem pracovně namontovat motory EMAX 2215/25 (viz foto). Tyto motory se rozbíhají dobře. Problém byl, že jsem překročil zamýšlenou váhu modelu. Původně jsem nepočítal se závěsem řízeným střídavými motory, to je hned téměř 170g navíc. Nastoupilo další zkoušení a měření tahu motorů s použitím různých vrtulí. Pro tuto váhu vyšla jednoznačně kombinace AXI 2217/20 a vrtule 12" x 3.8".
Elektronika
Základem je řídící elektronika DJI NAZA V2 s GPS a BT modulem. Pro řízení závěsu kamery pak Open Source deska od Martineze, pro řízení azimutu vlastní deska s procesorem ATmega a konečně pro přenos telemetrie deska Arduino Mini. DJI NAZA byla volba po dlouhém výběru. Má zajímavé způsoby inteligentního ovládání modelu v podobě kurz lock a home lock. Tyto módy fungují pouze s kompasem umístěným v jednotce GPS. V těchto módech nezáleží na natočení modelu a ke mě/ode mě nebo vpravo/vlevo je prostě ke mě/ode mě a vlevo/vpravo. V režimu home lock je ke mě ,přitáhnout páku klonění, model přiletí z libovolného natočení ke mě. Jsem zvyklý a nedělá mi problém otočení modelu ve svislé ose, jinak bych nemohl řídit vrtulníky, ale při fotografování a filmování toto značně zjednoduší řízení. Navíc, u vzdáleného modelu visícího ve 300m nepoznáte kde je předek.
První fotografie zcela dokončeného modelu.
První letecké fotky.
 |
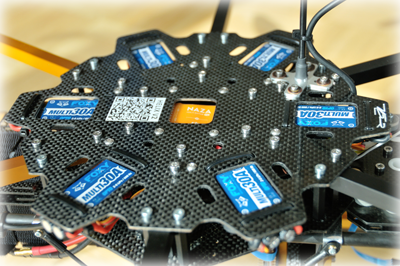 |
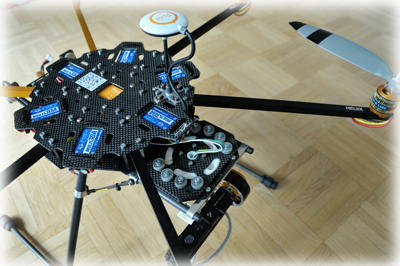
| Celkový pohled | Horní deska Pro identifikaci modelu dlouhou dobu používám QR kód. |
 |
 |
| Levé zadní rameno s motorem | Zadní část s deskou pro baterii |
 |
 |
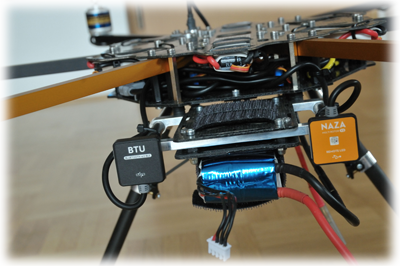
| Závěs kamery | Modré regulátory a modul GPS. |
 |
 |
| Díly pro stabilizovaný závěs | Stabilizovaný závěs. |
Historie projektu
| Datum | Popis | Dokument |
|---|---|---|
| 19.8.2010 | Začátek 3D návrhu | |
| 24.8.2010 | WEBovská stránka | |
| 29.8.2010 | Výroba duralových ramen. Profil 10x10x100 pro tři ramena z OBI. |
|
| 4.9.2010 | Výroba unašečů |
|
| 11.9.2010 | plexisklový model | |
| 13.9.2010 | návrh a výroba LED pásků na ramena | |
| 14.9.2010 | studie ESC (Electronic Speed Control) - budu potřebovat 18A |
|
| 11.5.2011 | práce přerušena na delší dobu. Čas ale nebyl promarněn. Všechno úsilí jsme věnovali na výrobu CNC frézy. | |
| 15.6.2013 | Návrh verze V2 | |
| 8.12.2013 | RTF zatím bez stabilizovaného závěsu | |
| 15.2.2014 | Končně jsem mohl vyzvednout díly na stabilizovanou plošinu z eloxu | |
| 1.3.2014 | Doladění sabilizovaného závěsu, zalétání a první video |
| 16.III.2014 |